ML: PINN代码-pitzDaily流动 (适配FVM网格)
本文在ML: PINN代码实例-顶盖驱动流 (NS方程) 的基础上,增加OpenFOAM网格适配功能。主要是代码可以自动读取OpenFOAM网格。因此对于任意的OpenFOAM算例,可以直接进行训练。但是需要注意:
目前的代码只支持2D,也就是说NS方程只是植入的二维方程;
数据损失部分是硬植入,因此需要用户去更改代码自定义;
PINN训练的时候,PINN所需要的网格可能跟FVM的有区别,在这种情况下,PINN网格与FVM网格不一致,则不适配与本代码(本代码PINN网格与FVM网格完全一致);
由于代码量过大,不对其进行介绍。建议系统学习OpenFOAM以及libtorch后再来理解。
// pitzDaily flow predicted by PINN, by dyfluid.com
#include <torch/torch.h>
#include "fvCFD.H"
// 神经网络头文件
struct ANN
:
torch::nn::Cloneable<ANN>
{
torch::nn::Sequential net_;
int n_;
int l_;
int ipNum_;
int opNum_;
public:
ANN(int n, int l, int ipNum, int opNum)
:
n_(n),//neuron number
l_(l),//layer number
ipNum_(ipNum),//input number
opNum_(opNum)//output number
{
reset();
}
void reset() override
{
net_ = torch::nn::Sequential();
// input layers
net_->push_back(torch::nn::Linear(ipNum_, n_));
net_->push_back(torch::nn::Tanh());
// hidden layers
for (int i = 0; i < l_; i++)
{
net_->push_back(torch::nn::Linear(n_, n_));
net_->push_back(torch::nn::Tanh());
}
// output layer
net_->push_back(torch::nn::Linear(n_, opNum_));
register_module("net", net_);
}
auto forward(torch::Tensor x)
{
return net_->forward(x);
}
};
int main(int argc, char *argv[])
{
#include "setRootCaseLists.H"
#include "createTime.H"
#include "createMesh.H"
// 必要的神经网络参数
IOdictionary trainingProperties
(
IOobject
(
"trainingProperties",
runTime.constant(),
mesh,
IOobject::MUST_READ_IF_MODIFIED,
IOobject::NO_WRITE
)
);
// network
int iter = trainingProperties.lookup<int>("iter");
double lr = trainingProperties.lookup<double>("learningRate");
int NNnum = trainingProperties.lookup<int>("numberOfNeu");
int layers = trainingProperties.lookup<int>("numberOfLayers");
int ipNum = trainingProperties.lookup<int>("inputNumber");
int opNum = trainingProperties.lookup<int>("outputNumber");
// Outer iterations
bool CFD = trainingProperties.lookupOrDefault<bool>("CFD", false);
bool training = trainingProperties.lookupOrDefault<bool>("training", false);
int BATCH = trainingProperties.lookupOrDefault<int>("batch", 0);
int CHANNEL = trainingProperties.lookupOrDefault<int>("channel", 0);
torch::manual_seed(0);
auto net = std::make_shared<ANN>(NNnum, layers, ipNum, opNum);
auto crit = torch::nn::MSELoss();
torch::optim::AdamW opti(net->parameters(), torch::optim::AdamWOptions(lr));
ifstream file;
file.open("net.pth");
if (file)
{
Info<< "Netword exists, reading..." << endl;
torch::load(net, "net.pth");
}
else
{
Info<< "File does not exists, train from scratch"
<< endl;
}
// 流体流动相关参数,训练权重等
const dictionary& pinnProperties = trainingProperties.subDict("pinnProperties");
double nu = readScalar(pinnProperties.lookup("nu"));
double vel = readScalar(pinnProperties.lookup("inletU"));
double w_data = readScalar(pinnProperties.lookup("weightsDATA"));
double w_bd = readScalar(pinnProperties.lookup("weightsBD"));
double w_pde = readScalar(pinnProperties.lookup("weightsPDE"));
// OpenFOAM网格与libtorch适配
vectorField ofMesh = mesh.C();
auto meshTorch = torch::full({ofMesh.size(),1,2}, 0.0);
forAll(ofMesh, i)
{
double x = ofMesh[i].x();
double y = ofMesh[i].y();
auto posi = torch::tensor({x,y}).reshape({1,2});
meshTorch[i] = posi;
}
const surfaceVectorField& Cf = mesh.Cf();
const surfaceVectorField& Sf = mesh.Sf();
const surfaceScalarField& magSf = mesh.magSf();
label inletID = mesh.boundaryMesh().findPatchID("inlet");
label outletID = mesh.boundaryMesh().findPatchID("outlet");
label wallID = mesh.boundaryMesh().findPatchID("wall");
vectorField cfInlet = Cf.boundaryField()[inletID];
vectorField cfOutlet = Cf.boundaryField()[outletID];
vectorField cfWall = Cf.boundaryField()[wallID];
vectorField nWall =
Sf.boundaryField()[wallID]/magSf.boundaryField()[wallID];
auto inlet = torch::full({cfInlet.size(),1,2}, 0.0);
auto outlet = torch::full({cfOutlet.size(),1,2}, 0.0);
auto wall = torch::full({cfWall.size(),1,2}, 0.0);
auto nlx = torch::full({cfWall.size()}, 0.0);
auto nly = torch::full({cfWall.size()}, 0.0);
forAll(cfInlet, i)
{
double x = cfInlet[i].x();
double y = cfInlet[i].y();
auto posi = torch::tensor({x,y}).reshape({1,2});
inlet[i] = posi;
}
forAll(cfWall, i)
{
double x = cfWall[i].x();
double y = cfWall[i].y();
auto posi = torch::tensor({x,y}).reshape({1,2});
wall[i] = posi;
}
forAll(cfOutlet, i)
{
double x = cfOutlet[i].x();
double y = cfOutlet[i].y();
auto posi = torch::tensor({x,y}).reshape({1,2});
outlet[i] = posi;
}
forAll(cfWall, i)
{
nlx[i] = nWall[i].x();
nly[i] = nWall[i].y();
}
// PINN代码正文在这里开始
meshTorch = meshTorch.reshape({-1,2});
inlet = inlet.reshape({-1,2});
outlet = outlet.reshape({-1,2});
wall = wall.reshape({-1,2});
auto u_inlet = torch::full({cfInlet.size()}, vel);
auto v_inlet = torch::full({cfInlet.size()}, 0.0);
meshTorch.requires_grad_(true);
inlet.requires_grad_(true);
outlet.requires_grad_(true);
wall.requires_grad_(true);
// 数据损失点1
auto dataPosi = torch::full({9,1,2}, 0.0);
dataPosi[0] = torch::tensor({-0.02 , 0.012}).reshape({1,2});
dataPosi[1] = torch::tensor({-0.018, 0.012}).reshape({1,2});
dataPosi[2] = torch::tensor({-0.016, 0.012}).reshape({1,2});
dataPosi[3] = torch::tensor({-0.014, 0.012}).reshape({1,2});
dataPosi[4] = torch::tensor({-0.012, 0.012}).reshape({1,2});
dataPosi[5] = torch::tensor({-0.01 , 0.012}).reshape({1,2});
dataPosi[6] = torch::tensor({0.0 , 0.012}).reshape({1,2});
dataPosi[7] = torch::tensor({0.1 , 0.012}).reshape({1,2});
dataPosi[8] = torch::tensor({0.2 , 0.012}).reshape({1,2});
dataPosi = dataPosi.reshape({-1,2});
if (torch::cuda::is_available())
{
std::cout<< "Running on GPU" << std::endl;
//
}
else
{
std::cout<< "Running on CPU" << std::endl;
}
for (int i = 0; i < iter; i++)
{
opti.zero_grad();
auto UP = net->forward(meshTorch);
auto UPinlet = net->forward(inlet);
auto UPoutlet = net->forward(outlet);
auto UPwall = net->forward(wall);
auto UPdata = net->forward(dataPosi);
auto u_pred = UP.index({torch::indexing::Slice(), 0});
auto v_pred = UP.index({torch::indexing::Slice(), 1});
auto p_pred = UP.index({torch::indexing::Slice(), 2});
auto u_pred_inlet = UPinlet.index({torch::indexing::Slice(), 0});
auto v_pred_inlet = UPinlet.index({torch::indexing::Slice(), 1});
auto p_pred_inlet = UPinlet.index({torch::indexing::Slice(), 2});
auto u_pred_outlet = UPoutlet.index({torch::indexing::Slice(), 0});
auto v_pred_outlet = UPoutlet.index({torch::indexing::Slice(), 1});
auto p_pred_outlet = UPoutlet.index({torch::indexing::Slice(), 2});
auto u_pred_wall = UPwall.index({torch::indexing::Slice(), 0});
auto v_pred_wall = UPwall.index({torch::indexing::Slice(), 1});
auto p_pred_wall = UPwall.index({torch::indexing::Slice(), 2});
auto u_pred_data = UPdata.index({torch::indexing::Slice(), 0});
auto v_pred_data = UPdata.index({torch::indexing::Slice(), 1});
auto p_pred_data = UPdata.index({torch::indexing::Slice(), 2});
auto dpdMesh =
torch::autograd::grad
(
{p_pred},
{meshTorch},
{torch::ones_like(p_pred)},
true,
true
)[0];
auto dpdx = dpdMesh.index({torch::indexing::Slice(), 0});
auto dpdy = dpdMesh.index({torch::indexing::Slice(), 1});
auto dpdxMesh =
torch::autograd::grad
(
{dpdx},
{meshTorch},
{torch::ones_like(dpdx)},
true,
true
)[0];
auto dpdyMesh =
torch::autograd::grad
(
{dpdy},
{meshTorch},
{torch::ones_like(dpdy)},
true,
true
)[0];
auto dpdxx = dpdxMesh.index({torch::indexing::Slice(), 0});
auto dpdyy = dpdyMesh.index({torch::indexing::Slice(), 1});
auto dudMesh =
torch::autograd::grad
(
{u_pred},
{meshTorch},
{torch::ones_like(u_pred)},
true,
true
)[0];
auto dudx = dudMesh.index({torch::indexing::Slice(), 0});
auto dudy = dudMesh.index({torch::indexing::Slice(), 1});
auto dvdMesh =
torch::autograd::grad
(
{v_pred},
{meshTorch},
{torch::ones_like(v_pred)},
true,
true
)[0];
auto dvdx = dvdMesh.index({torch::indexing::Slice(), 0});
auto dvdy = dvdMesh.index({torch::indexing::Slice(), 1});
auto dudxMesh =
torch::autograd::grad
(
{dudx},
{meshTorch},
{torch::ones_like(dudx)},
true,
true
)[0];
auto dudxx = dudxMesh.index({torch::indexing::Slice(), 0});
auto dudyMesh =
torch::autograd::grad
(
{dudy},
{meshTorch},
{torch::ones_like(dudy)},
true,
true
)[0];
auto dudyy = dudyMesh.index({torch::indexing::Slice(), 1});
auto dudxy = dudyMesh.index({torch::indexing::Slice(), 0});
auto dvdxMesh =
torch::autograd::grad
(
{dvdx},
{meshTorch},
{torch::ones_like(dvdx)},
true,
true
)[0];
auto dvdyMesh =
torch::autograd::grad
(
{dvdy},
{meshTorch},
{torch::ones_like(dvdy)},
true,
true
)[0];
auto dvdxx = dvdxMesh.index({torch::indexing::Slice(), 0});
auto dvdxy = dvdxMesh.index({torch::indexing::Slice(), 1});
auto dvdyy = dvdyMesh.index({torch::indexing::Slice(), 1});
auto dpdWall =
torch::autograd::grad
(
{p_pred_wall},
{wall},
{torch::ones_like(p_pred_wall)},
true,
true
)[0];
auto dpdx_wall = dpdWall.index({torch::indexing::Slice(), 0});
auto dpdy_wall = dpdWall.index({torch::indexing::Slice(), 1});
auto dpdInlet =
torch::autograd::grad
(
{p_pred_inlet},
{inlet},
{torch::ones_like(p_pred_inlet)},
true,
true
)[0];
auto dpdx_inlet = dpdInlet.index({torch::indexing::Slice(), 0});
auto dudOutlet =
torch::autograd::grad
(
{u_pred_outlet},
{outlet},
{torch::ones_like(u_pred_outlet)},
true,
true
)[0];
auto dudx_outlet = dudOutlet.index({torch::indexing::Slice(), 0});
auto cont1 = dudx + dvdy;
auto mom1 = 2.0*u_pred*dudx + v_pred*dudy + u_pred*dvdy
- nu*(dudxx + dudyy) - nu*(dudxx + dvdxy) + dpdx;
auto mom2 = u_pred*dvdx + v_pred*dudx + 2.0*v_pred*dvdy
- nu*(dvdxx + dvdyy) - nu*(dudxy + dvdyy) + dpdy;
auto loss_cont1 = 100*crit(cont1, 0*cont1);
auto loss_mom1 = crit(mom1, 0*mom1);
auto loss_mom2 = crit(mom2, 0*mom2);
auto loss_wall =
crit(u_pred_wall, 0*u_pred_wall)
+ crit(v_pred_wall, 0*v_pred_wall)
+ crit(dpdx_wall*nlx + dpdy_wall*nly, 0*dpdx_wall);
auto loss_inlet =
crit(u_pred_inlet, u_inlet)
+ crit(v_pred_inlet, v_inlet)
+ crit(dpdx_inlet, 0*dpdx_inlet);
auto loss_outlet =
crit(p_pred_outlet, 0*p_pred_outlet)
+ crit(dudx_outlet, 0*dudx_outlet);
// 数据损失点2
auto u_data = torch::clone(u_pred_data);
u_data[0] = 0.100576;
u_data[1] = 0.105416;
u_data[2] = 0.119608;
u_data[3] = 0.126239;
u_data[4] = 0.136212;
u_data[5] = 0.139621;
u_data[6] = 0.144101;
u_data[7] = 0.059066;
u_data[8] = 0.059812;
auto v_data = torch::clone(v_pred_data);
v_data[0] = 0.00104886;
v_data[1] = 0.00234075;
v_data[2] = 0.00260724;
v_data[3] = 0.00198026;
v_data[4] = 6.03697e-05;
v_data[5] = -0.00107153;
v_data[6] = -0.0160208;
v_data[7] = -0.00029105;
v_data[8] = -0.00081997;
auto p_data = torch::clone(p_pred_data);
p_data[0] = 0.136748;
p_data[1] = 0.138309;
p_data[2] = 0.138134;
p_data[3] = 0.136637;
p_data[4] = 0.132631;
p_data[5] = 0.130444;
p_data[6] = 0.112201;
p_data[7] = 0.066805;
p_data[8] = 0.042315;
auto loss_data =
w_data*(crit(u_pred_data, u_data) + crit(v_pred_data, v_data));
auto loss_boundary = w_bd*(loss_inlet + loss_wall + loss_outlet);
auto loss_pde = w_pde*(loss_cont1 + loss_mom1 + loss_mom2);
auto loss = loss_pde + loss_boundary + loss_data;
loss.backward();
opti.step();
if (i % 100 == 0)
{
std::cout<< i
<< ": pde: " << loss_pde.item<double>()
<< ": data: " << loss_data.item<double>()
<< ", boundary: " << loss_boundary.item<double>()
<< ", cont: " << loss_cont1.item<double>()
<< ", momx: " << loss_mom1.item<double>()
<< ", momy: " << loss_mom2.item<double>()
<< ", All: " << loss.item<double>()
<< std::endl;
std::ofstream meshTorchfile("mesh");
meshTorchfile << meshTorch << "\n";
std::ofstream ufile("up");
ufile << UP << "\n";
torch::save(net, "net.pth");
}
}
return 0;
}
该代码运行后,会自动输出结果文件。可以参考ML: PINN代码实例-顶盖驱动流 (NS方程) 来生成图片。相应的结果如下:
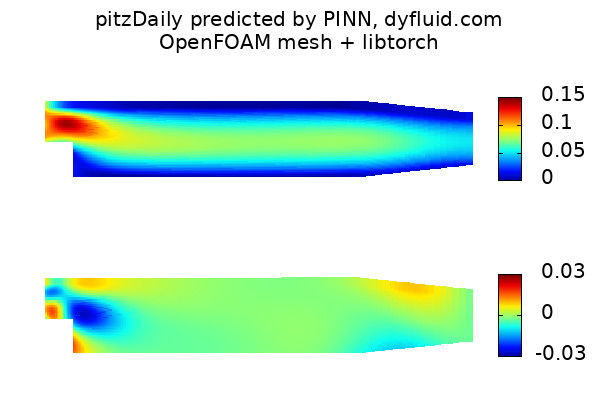
这个算例训练了非常长的时间,几点特征:
如果采用原生的NS方程,且采用FVM同样的网格点,FVM大概2秒算完,PINN训练大约需要30小时(GPU),且还没有训练结束。如果采用CPU训练,会特别慢;
建议调用拓展的NS方程,例如将连续性方程转化为流动的势函数,研究能否加速训练;
建议生成适配pitzDaily网格的配点,研究能否加速训练;